Another way to define a unique point on a manifold is by the use of coordinate systems. Coordinate systems are collections of numbers (a1, a2... an) that tell one how to identify a point uniquely. There are a number of ways to do this, but within each and every system lies the dimension of the manifold, for the number of coordinates needed to define a point uniquely is the same as the number of dimensions of the manifold.
There are many possible coordinate systems, and some may be more effective on some manifolds than on others. Consider the circle, the simplest of all manifolds.

The circular coordinate system (click to enlarge). The angle "a" uniquely determines a point on the circle, and the circle is therefore a one-dimensional manifold. Note that, similar to the difference between the sphere and the ball, the circle is only the line itself, while the interior of the plane defined by the circle is known as a disc. a is taken to be an angle between 0 and 2π if each point on the circle is to have a unique coordinate.

A similar process works for the line, an infinite manifold where the (signed) distance from 0 defines a unique point. The above is also called the number line.
For two dimensions, one can combine distance and angle coordinates in several combinations.
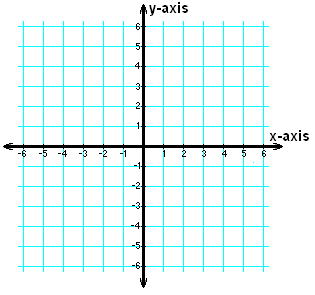
For the plane, an infinite two-dimensional manifold, two distance coordinates, taken in perpendicular directions, uniquely define a point (see below). The system, usually using x and y for the directions of coordinates, or axes, is called the Cartesian system. Points are found by following the x-axis for a distance b, and then moving perpendicularly (parallel to the y-axis) some distance c. The point is labeled (b,c).
For the aforementioned disc, the angular and linear (distance) systems are combined.

The figure above is essentially equivalent to the circular system mentioned previously, with one exception. An additional coordinate, r, is added to denote the distance from the center O of the disc. In reality, the distance r can be arbitrarily large, and the disc therefore infinite, making the angular-linear or polar coordinate system work for the plane as well. However, the restriction of r to being less than or equal to the radius of the disc emphasizes the different construction of the polar system versus the Cartesian system, and how it builds off the circular coordinate system.

The final simple possibility is the double angular or spherical system, shown above. It expands off the angular system of the circle, constructing another plane perpendicular to the plane containing the circle. The angle of elevation off the plane serves as the second angle, θ, in addition to the original circular angle, φ.
For three dimensions, there are several more cases.

The first is the triple linear system, with three axes, x, y, and z. Distances in the direction of each axis are given to uniquely determine a point. (negative coordinates signify movement in the opposite direction)

The second possibility is a system with two linear coordinates and one angular coordinate. A manifold using this system is the solid cylinder, or rod. The rod system is based off the disc system, with the angular and first linear coordinates defining a disc, and the second linear coordinate defining distance up the rod. In the above views, the rod is not solid, and instead two circular cross sections are shown to emphasize the first linear dimension. If one was to disregard the first linear dimension, a normal cylinder would result, and this is therefore another possibility for the two dimensional angular system. Consequently, the cylinder is a 2-manifold, and the rod is a 3-manifold. Again, both linear dimensions are restricted to finite values for emphasis.

The system with two angular coordinates and one linear coordinate is the ball system, as the ball is the simplest manifold with this system. The ball, as previously mentioned, is simply a solid sphere, with identical angular dimensions. A (restricted) linear dimension is added to denote the distance from the center of the ball, uniquely identifying a point.
The final possibility is the notion of a system with three angular coordinates. Following the pattern of the circle and the sphere, this manifold should also be the set of points equidistant to a fixed point. The set of manifolds with this property are generally called n-spheres, where n is the number of dimensions in the manifold. The circle is then the 1-sphere, the sphere the 2-sphere, and this new manifold, the 3-sphere. However, the full geometry of the three-sphere cannot be expressed with three dimensions, and instead requires four to reveal its curvature.
This generation of manifolds can continue indefinitely through any dimension, but the above process only produces a limited number of manifolds, i.e. the simplest of every dimension. Also, there are multiple possibilities for each system, with the disc and cylinder being one example given above. There are many other similar pairs in higher dimensions when one changes the orientation of the linear and angular dimensions.
Coordinates are necessary in performing mathematical operations on manifolds, and in mapping between them. The differences between angular and linear coordinates, and the number of dimensions needed to express them open the gates to a limitless world of surfaces, which the above method has only begun to explore. For the next post, see here.
Sources: http://www.ibiblio.org/links/devmodules/shared/html/glossary.html, http://www.mathematic.ws/, http://en.wikipedia.org/wiki/Spherical_coordinate_system, Visual Complex Analysis by Tristan Needham,











